Cheers guys, this picture had been bothering me for a while...
And as for pendulum resonance, it's a fine means to add or subtract energy to/from the wheel, just not via passive activation tho - they need input energy from somewhere, so a pendu-wheel on its own can't form a 'prime mover'.. i think...
This whole little foray into pendu-wheels was just the result of aimless doodling in WM2D rather than any firm hypothesis. I'm still undecided if the pendulums in B.'s illustrations are 'literal' or metaphors...
Toad Elevating Moment
Moderator: scott

re: Toad Elevating Moment
Hi Mr V ..
Can you put up the link to the picture - I haven't seen it before & I'd like to see it in context.
Can you put up the link to the picture - I haven't seen it before & I'd like to see it in context.

The picture comes from http://orffyre.tripod.com/overview.html
Were it comes from before that I don't know.
PS, the site asks for a password, but it does not prevent viewing. Just click the cancel button.

Were it comes from before that I don't know.
PS, the site asks for a password, but it does not prevent viewing. Just click the cancel button.

re: Toad Elevating Moment
The original image appears in a book authored by Gintaras Grajauskas, and illustated by Lina Kusaitė.
Image here: http://www.durys.daily.lt/?lt=1320226127
Book here: http://www.tytoalba.lt/istorijos-apie-n ... ri-kaindli
The Google Image Search that I did also shows it appearing on several other websites as well.
- Link [to large to paste] -
edit - the google search was for the modified image - mersburghmore.jpg
Image here: http://www.durys.daily.lt/?lt=1320226127
Book here: http://www.tytoalba.lt/istorijos-apie-n ... ri-kaindli
The Google Image Search that I did also shows it appearing on several other websites as well.
- Link [to large to paste] -
edit - the google search was for the modified image - mersburghmore.jpg
Last edited by Mark on Sun Feb 02, 2014 12:58 am, edited 1 time in total.
-
MrVibrating
- Addict

- Posts: 2879
- Joined: Sat Jul 31, 2010 12:19 am
- Location: W3
re: Toad Elevating Moment
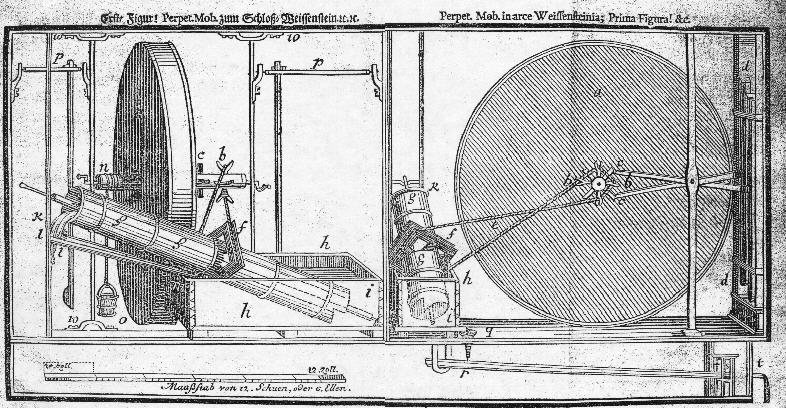
Good find, so it's just a creative little a cut'n'paste job... and yep, i found it on the Tripod site (which is a little flaky in places, but gives an entertaining narrative)..
FWIW, the occlusion thing i was on about earlier; here's a piccy:

- as you can see, the seemingly erratic composition on the right image is a juxtaposition of the pendulum stand and the wall bracket from the left image.
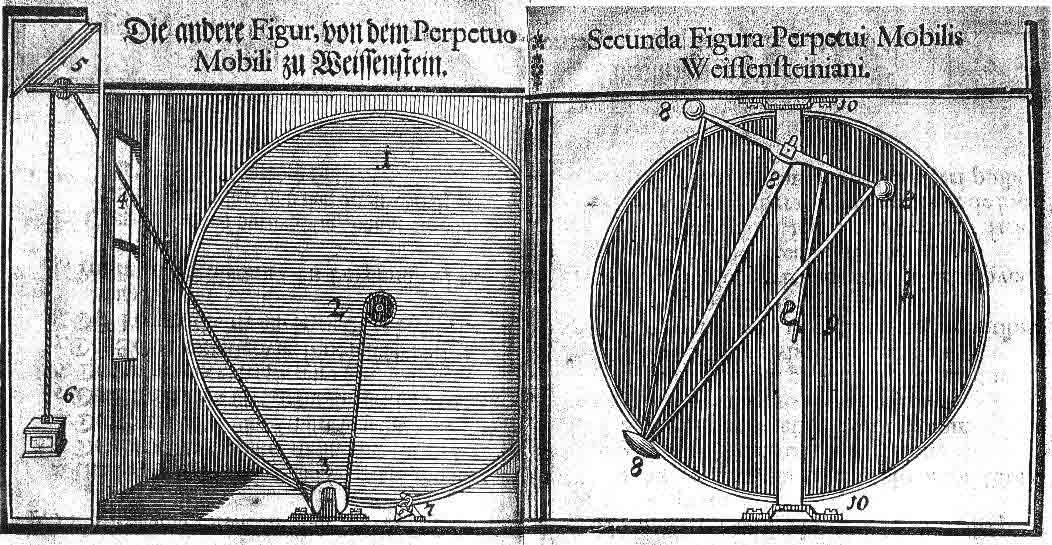
In the left image the bracket denotes "the open nature" of the exhibit - but also demarks the beginning or end of a sequence of actions - as if it's a metaphorical terminus of some kind..? In this image:

we again get the occlusion error, but this time with a doubled horizontal beam - so what's the consistent interpretation between these deliberate anomalies?
Why are the brackets numbered "10" in the upper left image when everything else in it is lettered? "P" for pendulum, but 10 for a bracket seems a weird convention, perhaps distinguishing the meaning of the brackets in some way..?
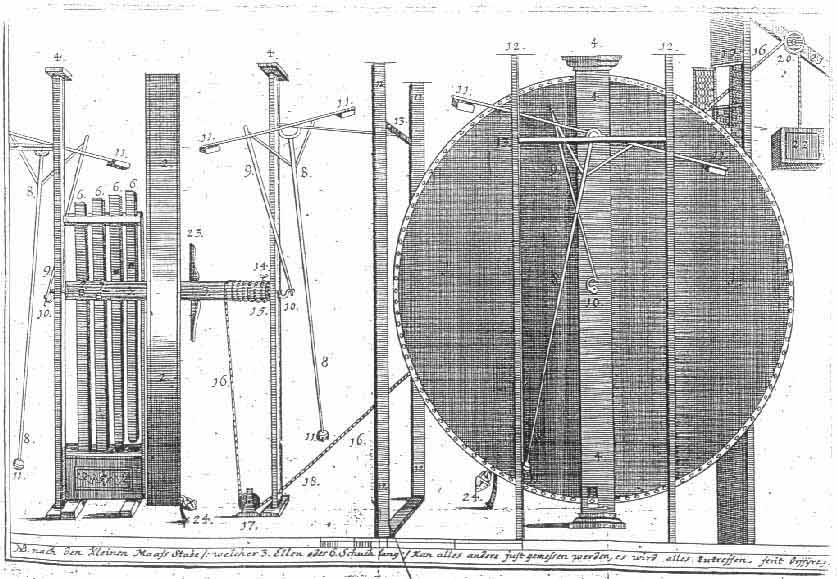
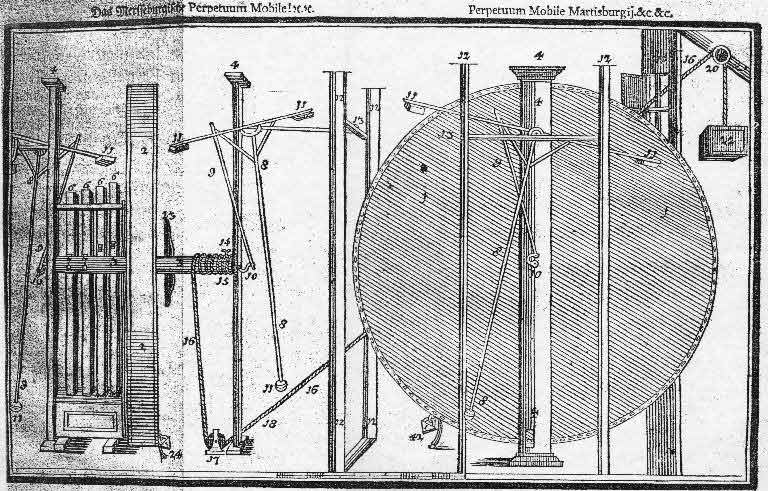
Occlusions in the water-wheel rope switch positions - a reference to something switching between layers of mechanism?
And he seems overly generous with his screw heads - nice "M" shape there - reminds me of the top suspension hole in the illustration of Wagner's roasting-spit contraption - also consistent with the biased pendulums in the Merseburg illustrations. Perhaps this is hinting at pendulums of some kind switching their bias angles mid-cycle?
Also on the image depicting the water wheel, the pendulums' upper horizontal sections are of unequal length - is their ratio significant, or just incidental?
I've been chewing these questions over the last week or so without any progress..
FWIW, the occlusion thing i was on about earlier; here's a piccy:
- as you can see, the seemingly erratic composition on the right image is a juxtaposition of the pendulum stand and the wall bracket from the left image.
In the left image the bracket denotes "the open nature" of the exhibit - but also demarks the beginning or end of a sequence of actions - as if it's a metaphorical terminus of some kind..? In this image:
we again get the occlusion error, but this time with a doubled horizontal beam - so what's the consistent interpretation between these deliberate anomalies?
Why are the brackets numbered "10" in the upper left image when everything else in it is lettered? "P" for pendulum, but 10 for a bracket seems a weird convention, perhaps distinguishing the meaning of the brackets in some way..?
Occlusions in the water-wheel rope switch positions - a reference to something switching between layers of mechanism?
And he seems overly generous with his screw heads - nice "M" shape there - reminds me of the top suspension hole in the illustration of Wagner's roasting-spit contraption - also consistent with the biased pendulums in the Merseburg illustrations. Perhaps this is hinting at pendulums of some kind switching their bias angles mid-cycle?
Also on the image depicting the water wheel, the pendulums' upper horizontal sections are of unequal length - is their ratio significant, or just incidental?
I've been chewing these questions over the last week or so without any progress..
- Attachments
-
-
The drawings which contain letters are of Bessler's 4th wheel which was displayed and tested in Count Carl's Weissenstein castle in Kassel Germany. This 4th wheel is usually referred to as the Kassel Wheel.MrVibrating wrote:Why are the brackets numbered "10" in the upper left image when everything else in it is lettered? "P" for pendulum, but 10 for a bracket seems a weird convention, perhaps distinguishing the meaning of the brackets in some way..?
See: http://www.besslerwheel.com/images/Kassel-1stFigure.jpg and http://www.besslerwheel.com/images/Kassel-2ndFigure.jpg
The drawings which contain numbers are of Bessler's 3rd wheel which was displayed and tested by officials in Merseburg Germany. This 3rd wheel is usually referred to as the Merseburg Wheel.
See http://www.besslerwheel.com/images/Merseburg_wheel1.jpg and http://www.besslerwheel.com/images/Merseburg_wheel2.jpg
As far as I know, there are no drawings by Bessler of his 1st wheel which was displayed in Bessler's home in Gera, nor by Bessler of his 2nd wheel which was displayed in his home in Draschwitz.
Borlach (one of Bessler's enemies) made at least two drawings showing Bessler's 3rd (Merseburg) wheel with a guy in an adjoining room pulling on a rope that then passed up through the attic then down through the support pillars so as to rotate Bessler's wheel. The larger of these two drawings by Borlach shows a 'fence' behind the wheel. Bessler used a fence for crowd control much like is done at carnivals to protect people from being hurt by the motions of the amusement rides.
Note that Bessler never showed his very first number 'zero' (proof of principle) wheel that barely self-turned. And there is evidence that Bessler had smaller wheels in his home that were not publicly displayed. Bessler may have built as many as seven working wheels.
-
MrVibrating
- Addict
- Posts: 2879
- Joined: Sat Jul 31, 2010 12:19 am
- Location: W3
-
MrVibrating
- Addict
- Posts: 2879
- Joined: Sat Jul 31, 2010 12:19 am
- Location: W3
-
MrVibrating
- Addict
- Posts: 2879
- Joined: Sat Jul 31, 2010 12:19 am
- Location: W3
I've been kicking over a concept in my head for a few months, hasn't really gone anywhere but i've been having another look this evening..
I call it "pods". Pods are self-contained GPE/GMH 'batteries' - they each contain a weight that can be dropped and raised, but their whole point is that the weight of a pod never changes, regardless of whether its internal GPE is charged or discharged. The aim is to begin the decoupling of input and output by physically separating the GPE interactions from the wheel's state of balance, so that it's always balanced, no matter the internal state of any of its pods.
So ATM i'm looking to use the GPE in the pods to torque the wheel via a transmission system, hence the whole thing reduces to the prospects for resetting the internal states of the pods via rotation of the wheel.
Obviously, the pods have to hang from the wheel, in order to insulate their CoG from the wheel's (ie.the whole point), however they also need to be flipped upside down in order to reset their GPE, and rotation of the wheel, perfectly balanced or not, cannot do that while the pods are hanging... so they need to lock or land on some part of the wheel at some point in their cycle around it.
Obviously if there isn't a way of doing this last step on the cheap, then it's all just another dead end.. for now though, i'm intrigued by the fact that the actual weights have two different GPE's at any one time - one relative to their positions within their pods, and another with respect to their actual height on the wheel.
I'm wondering if there's a gainful way to swap between these two GPE's... still playing with it for the time being..
Edit: found that if the pods are allowed to drag across the floor, ie. somewhat horizontally, then vertical pods can reset them (using pulleys). So i just need a way to transmit force from inside the pods to torque on the wheel...
I call it "pods". Pods are self-contained GPE/GMH 'batteries' - they each contain a weight that can be dropped and raised, but their whole point is that the weight of a pod never changes, regardless of whether its internal GPE is charged or discharged. The aim is to begin the decoupling of input and output by physically separating the GPE interactions from the wheel's state of balance, so that it's always balanced, no matter the internal state of any of its pods.
So ATM i'm looking to use the GPE in the pods to torque the wheel via a transmission system, hence the whole thing reduces to the prospects for resetting the internal states of the pods via rotation of the wheel.
Obviously, the pods have to hang from the wheel, in order to insulate their CoG from the wheel's (ie.the whole point), however they also need to be flipped upside down in order to reset their GPE, and rotation of the wheel, perfectly balanced or not, cannot do that while the pods are hanging... so they need to lock or land on some part of the wheel at some point in their cycle around it.
Obviously if there isn't a way of doing this last step on the cheap, then it's all just another dead end.. for now though, i'm intrigued by the fact that the actual weights have two different GPE's at any one time - one relative to their positions within their pods, and another with respect to their actual height on the wheel.
I'm wondering if there's a gainful way to swap between these two GPE's... still playing with it for the time being..
Edit: found that if the pods are allowed to drag across the floor, ie. somewhat horizontally, then vertical pods can reset them (using pulleys). So i just need a way to transmit force from inside the pods to torque on the wheel...

{kind=link}
{kind=link}
{kind=link}
{kind=link}
re: Toad Elevating Moment
Mr V.
I believe that when you are trying to "flip" your pod, this interaction will affect the wheel negatively. You are trying to counter this with weight dropping through the centre of the pod, providing the rotational power. It looks to me like a shiny new book with an exciting title that turns out to be "Romeo and Juliet" in disguise. IE. weight dropped/raised through the centre vs weight dropped/raised around the perimeter of the wheel (or your pod).
 MT49 represents the problems you will find in your POD. Although the method of shifting the weight around your pod will be different, the principle is the same.
MT49 represents the problems you will find in your POD. Although the method of shifting the weight around your pod will be different, the principle is the same.
Cheers
K.
I believe that when you are trying to "flip" your pod, this interaction will affect the wheel negatively. You are trying to counter this with weight dropping through the centre of the pod, providing the rotational power. It looks to me like a shiny new book with an exciting title that turns out to be "Romeo and Juliet" in disguise. IE. weight dropped/raised through the centre vs weight dropped/raised around the perimeter of the wheel (or your pod).
MT49 represents the problems you will find in your POD. Although the method of shifting the weight around your pod will be different, the principle is the same.Cheers
K.
-
MrVibrating
- Addict
- Posts: 2879
- Joined: Sat Jul 31, 2010 12:19 am
- Location: W3
re: Toad Elevating Moment
Hi Tarsier, yes, you're absolutely correct, i couldn't find a way to reset the pods from the wheel's KE, it's the same old same old...
-
MrVibrating
- Addict
- Posts: 2879
- Joined: Sat Jul 31, 2010 12:19 am
- Location: W3
I just watched Pi (1998) - cool movie, and it gave me an idea....
We have Bessler's acknowledgement of Kabbalistic cyphers and the "wisdom of the Hebrews" - so perhaps this mysterious use of the number 10 in the Weissenstein / Archimedes screw illustration is part of a key to an encoded message in the lettering?
Ten is an important Kabbalah number, but might also indicate an alternate number base (ie. 10 = 16 in hex). But if it's base p, then what's the value of p?
Are the relative axle lengths of the two pendulums marked p significant? The shorter axle seems around 55% the length of the longer one...
Totally blue-skying this here...
We have Bessler's acknowledgement of Kabbalistic cyphers and the "wisdom of the Hebrews" - so perhaps this mysterious use of the number 10 in the Weissenstein / Archimedes screw illustration is part of a key to an encoded message in the lettering?
Ten is an important Kabbalah number, but might also indicate an alternate number base (ie. 10 = 16 in hex). But if it's base p, then what's the value of p?
Are the relative axle lengths of the two pendulums marked p significant? The shorter axle seems around 55% the length of the longer one...
Totally blue-skying this here...
-
MrVibrating
- Addict
- Posts: 2879
- Joined: Sat Jul 31, 2010 12:19 am
- Location: W3
re: Toad Elevating Moment
I wouldn't normally post vids, but i could use some help getting to grips with my current config. The model's also included, although there's really nothing to it - the basic concept is two armatures, 180° opposite each other, and both raised and suspended 90° in the same direction.
There's no mechanism yet - the model's animated via motors. The only area of interest is the paths, and resulting I/O FxD integrals. At this stage, the actual mechanism that might implement these motions is incidental. The sole point of interest is an apparent difference in torque between the armature forces and resulting torque on the wheel.
If anyone wants to model this, you can do it from scratch in seconds, it's just 5 circles pinned together.
- measure the net static torque on the armatures
- then compare the static torque on the wheel
- note how these are consistent for all rotor angles
- play with the armature radius - the two torques diverge when the armature radii intersect or exceed the wheel's center.
And this last point is the interesting result in question. When the arm radii don't cross the center, i get 1:1 - the torque on the wheel equals the sum of the two armature torques.
However when meeting or overextending the main axle, the wheel's torque reduces significantly, while the armature torques of course stay the same. In these configs, i can get a 4:1 force ratio between the armatures and wheel.
Also note that whatever the ratios, both torques are valid throughout the cycle, without variation - they're constant for a given config.
Initially, i was investigating whether the OB torque on the wheel would be enough to lift and hold the weights up like this - hence the clockwise direction shown here. However this was before i noted this apparent asymmetry.
In retrospect, the obvious way to leverage the asymmetry, if it's real, is to reverse the action i've modeled here, going anti-clockwise - hence rather than constantly lifting the weights, they're instead constantly falling (about their own axes), yet all the while being raised (against the wheel's OB torque).
This is counter-intuitive, at least for me - who'd've thought you'd want to create an OB torque so you could work against it, rather than have it work for you? It seems utterly backwards, yet all that matters is that there's a force asymmetry... the greater force should be able to over-power the weaker one, whichever's which...
The trouble i'm having is translating this force asymmetry to an energy difference. Because the armature and wheel have different radii, what it gains in force, is lost in distance, i think...
I'm not sure though - i can't quite get my head around the dynamics here ATM... the config ticks lots of boxes, not just for Bessler consistencies but also my own thinking (weights move into OB position and back again while descending, for example).
So, it's not OU, yet... i think... but could it be taken further? The weights are 'lifted' as they 'fall' (quote B. "i don't want to go into such matters, you couldn't comprehend how true craftmanship pwns etc etc."..
Remember also, that for all static point measurements (and you can try this yourselves) both torques - whatever their disparity - are constant throughout the cycle. That, to me, seems to strongly imply there's an energy gradient here, no?
And if it IS real, it still needs some kind of transmission system to coordinate it all (i've very few ideas on this for now); again, the motors i've used so far are just for animation purposes, to convey the concept.
I've a few more things to try yet: more static tests, more energy tests, transmission options, geometries (square / rectangular wheels etc).
Anyhoos, this is the first hint of a force differential i've seen in the last year so just wanted to share ASAP..
Edit: Added vid of the actual (ie. reversed) direction. Note that the weights are falling, but there's a 1:1 co-rotation of the wheel, hence for every degree the weights rotate CW, the wheel rotates one degree ACW - they're falling about their own axes, but being re-lifted about the wheel's axis at equal rate, hence the constant OB moment they generate is a load on the system; a negative rather than positive torque.
Again, this is just a motorized mock-up - its validity rests on that of the torque readings. However if they're correct, then in principle the weights could drive the wheel like this, with plenty of force to spare...
There's no mechanism yet - the model's animated via motors. The only area of interest is the paths, and resulting I/O FxD integrals. At this stage, the actual mechanism that might implement these motions is incidental. The sole point of interest is an apparent difference in torque between the armature forces and resulting torque on the wheel.
If anyone wants to model this, you can do it from scratch in seconds, it's just 5 circles pinned together.
- measure the net static torque on the armatures
- then compare the static torque on the wheel
- note how these are consistent for all rotor angles
- play with the armature radius - the two torques diverge when the armature radii intersect or exceed the wheel's center.
And this last point is the interesting result in question. When the arm radii don't cross the center, i get 1:1 - the torque on the wheel equals the sum of the two armature torques.
However when meeting or overextending the main axle, the wheel's torque reduces significantly, while the armature torques of course stay the same. In these configs, i can get a 4:1 force ratio between the armatures and wheel.
Also note that whatever the ratios, both torques are valid throughout the cycle, without variation - they're constant for a given config.
Initially, i was investigating whether the OB torque on the wheel would be enough to lift and hold the weights up like this - hence the clockwise direction shown here. However this was before i noted this apparent asymmetry.
In retrospect, the obvious way to leverage the asymmetry, if it's real, is to reverse the action i've modeled here, going anti-clockwise - hence rather than constantly lifting the weights, they're instead constantly falling (about their own axes), yet all the while being raised (against the wheel's OB torque).
This is counter-intuitive, at least for me - who'd've thought you'd want to create an OB torque so you could work against it, rather than have it work for you? It seems utterly backwards, yet all that matters is that there's a force asymmetry... the greater force should be able to over-power the weaker one, whichever's which...
The trouble i'm having is translating this force asymmetry to an energy difference. Because the armature and wheel have different radii, what it gains in force, is lost in distance, i think...
I'm not sure though - i can't quite get my head around the dynamics here ATM... the config ticks lots of boxes, not just for Bessler consistencies but also my own thinking (weights move into OB position and back again while descending, for example).
So, it's not OU, yet... i think... but could it be taken further? The weights are 'lifted' as they 'fall' (quote B. "i don't want to go into such matters, you couldn't comprehend how true craftmanship pwns etc etc."..
Remember also, that for all static point measurements (and you can try this yourselves) both torques - whatever their disparity - are constant throughout the cycle. That, to me, seems to strongly imply there's an energy gradient here, no?
And if it IS real, it still needs some kind of transmission system to coordinate it all (i've very few ideas on this for now); again, the motors i've used so far are just for animation purposes, to convey the concept.
I've a few more things to try yet: more static tests, more energy tests, transmission options, geometries (square / rectangular wheels etc).
Anyhoos, this is the first hint of a force differential i've seen in the last year so just wanted to share ASAP..
Edit: Added vid of the actual (ie. reversed) direction. Note that the weights are falling, but there's a 1:1 co-rotation of the wheel, hence for every degree the weights rotate CW, the wheel rotates one degree ACW - they're falling about their own axes, but being re-lifted about the wheel's axis at equal rate, hence the constant OB moment they generate is a load on the system; a negative rather than positive torque.
Again, this is just a motorized mock-up - its validity rests on that of the torque readings. However if they're correct, then in principle the weights could drive the wheel like this, with plenty of force to spare...
- Attachments
-
- 2torques.avi
- (554 KiB) Downloaded 2395 times
-
- TwoTorques.wm2d
- (12.25 KiB) Downloaded 100 times
-
- 2torques_r.avi
- (841 KiB) Downloaded 2375 times
-
MrVibrating
- Addict
- Posts: 2879
- Joined: Sat Jul 31, 2010 12:19 am
- Location: W3
This has so many circumstantial consistencies - it DOES have an OB force - it's heavy and full one side, empty and light the other, yet this is incidental (and indeed counterproductive) to the autorotation - just as Bessler tantalizingly intimated (the lesson of "bitter experience")..
The force ratio's right, at 4:1.
The weights come in pairs, one taking up a central position, the other nearer the rim - later they swap places.
The asymmetry is contingent upon 'crossing' the axis (an interpretation JC has recently suggested).
Weights alternately gravitate to the center then climb back up (and contra-rotating circles really couldn't put the matter more simply!)..
Is the "universal motion" the weights "must exercise" a reference to orbital trajectories? If so, bingo..
Edit - hmm could it be load-matching? The falling weights drive their own concurrent lift, and working against their own negative OB torque adds to their effective weight (that feeling of getting heavier as an elevator accelerates upwards)... this negative torque would supercharge the positive torque, boosting the negative, back into positive... etc.
The force ratio's right, at 4:1.
The weights come in pairs, one taking up a central position, the other nearer the rim - later they swap places.
The asymmetry is contingent upon 'crossing' the axis (an interpretation JC has recently suggested).
Weights alternately gravitate to the center then climb back up (and contra-rotating circles really couldn't put the matter more simply!)..
Is the "universal motion" the weights "must exercise" a reference to orbital trajectories? If so, bingo..
Edit - hmm could it be load-matching? The falling weights drive their own concurrent lift, and working against their own negative OB torque adds to their effective weight (that feeling of getting heavier as an elevator accelerates upwards)... this negative torque would supercharge the positive torque, boosting the negative, back into positive... etc.