Grimer wrote:
@ Fletcher
Did you stop the simple pendulum at its apogee in the manner required as shown in the Gravity Pulse Motor - Mark 2, here?......
http://www.besslerwheel.com/forum/weblo ... .php?e=159
In other words,
did you hold the simple pendulum at it apogee until the compound pendulum picked it up to form a single balanced beam?
Hi Frank .. I'm sure I described the actions in a previous post, & there was a sim to watch to show what happened, but I'll step thru it again.
N.B. the sim used a spar to replace your massless spring in your blog, set to elasticity of 1.0 [as was the bob] so the interaction was identical to using a perfect spring.
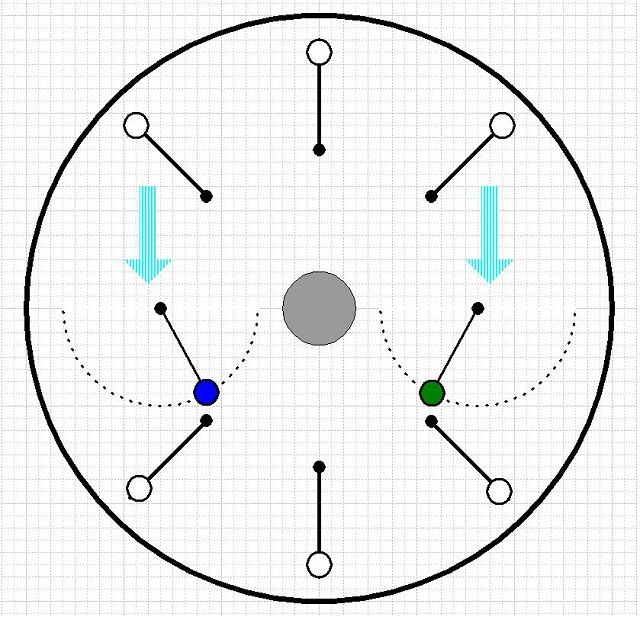
1. the bob driver is released & it swings down due gravity acceleration losing PE & gaining an equal amount of KE at the same vertical height [1 for 1 : there are no pin joint losses or air friction losses etc, else the KE gained would be less than the PE lost] - at 6 o'cl the bob has maximum KE.
2. the bob impacts the spar - some momentum is transferred.
3. the spar rotates CW lifting the blue counterweight off its stand - the bob rebounds CCW & as it climbs it loses KE & gains PE until it reaches its maximum vertical height where it has zero velocity & zero KE - it is not locked 'in space' at this time & is free to fall again.
4. the blue & yellow connected counter weights continue to rotate due momentum & energy given to them from the bob driver - this Rotational energy is exactly equal to the PE lost by the bob driver.
5. the CW rotating counter weight system is decelerating because of imbalance to the left blue side - left to its own it will rise a certain height & reverse direction to settle on its stand again eventually.
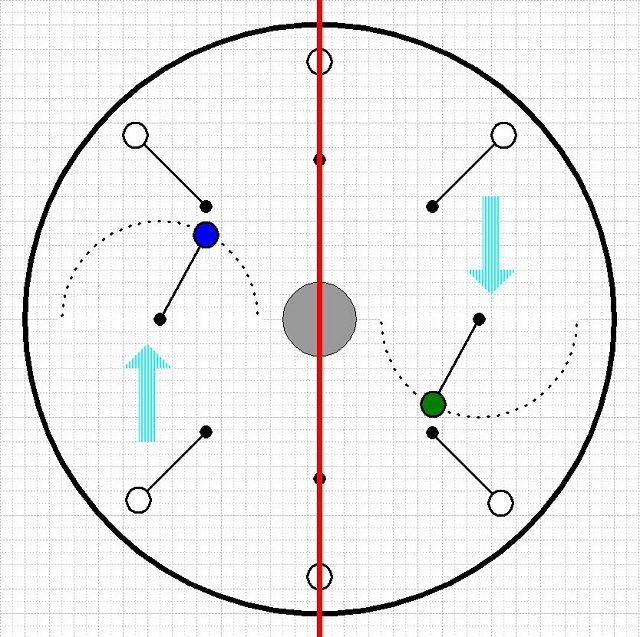
6. the cwt system is decelerating & losing RKE - at the same time the bob driver is rising after impact & the idea is the yellow cwt right hand side will meet up with the rising bob [whether on there own or by locking in space the bob at its maximum height achieved] - in the sim the bob arrives at max height first before the cwt system finishes decelerating & reverses direction.
7. N.B. if the bob was locked in space to await the arrival of the yellow cwt section it would not happen, or if it did because it was a perfect system they would arrive together & both be motionless i.e. no RKE, no residual momentum or angular momentum.
8. in the sim I built [as opposed to Tarsiers sim where he locked the two together at their closest point, one oscillation only] I let the bob driver fall again - whilst falling the cwt system reversed direction so the spar was moving slowly CCW when the bob driver impacted again - there was another momentum & energy exchange with rebounds in both directions as you would expect.
9. the cwt system started to decelerate again due imbalance - the bob got an additional 'nudge' from the CCW moving spar & rose to a greater height [below horizontal] than previously - and the spar decelerated until the yellow cwt section & the bob driver ALMOST met up exactly ready for coupling.
10. at their closest proximity they are coupled together - the system has NO momentum or RKE & is stationary - there is NO residual momentum or RKE to cause further rotation of the system.
N.B. this is a simulation environment [conservation laws in play] - we would not expect to see residual momentum or RKE without the addition of an external torque to the system - if you can identify somewhere in your GPM design that inertia is mitigated in favour of gaining residual momentum or RKE then it would have a chance of working in a real world build with actual real losses to contend with.
Hope that explains things fully, as I see the sim working.
The short answer is I did not hold it at apogee [Tarsier did] until the second oscillation when they were closest.