
I have tried hard to follow your line of thinking, cloud, but I can't fathom how you hope to obtain energy from what seems to be a normal pendulum swing from a fixed (in space) pivot in contrast to the Milkovic where the pendulum is far from fixed and the swing takes the mass around area in the vertical plane.
However since I believe the RAR works where weight does not seem to enclose a significant area (but presumably something along the plethora of connecting levers does) I realise that I've probably failed to grasp the subtleties of your device.
Anyway, the Best of British, as they say. :-)
Protoclocks, escapements and closing the loop in PM
Moderator: scott
-
cloud camper

- Devotee

- Posts: 1083
- Joined: Tue Mar 15, 2011 12:20 am
re: Protoclocks, escapements and closing the loop in PM
Thanks for the research Frank - that's helpful!
The Raymond oscillator you linked to seems to beg for an escapement to close the loop.
I haven't kept up too well with Milkovic but I can't understand why he never
incorporated one. Or maybe he did.
I was forced to develop my own version to allow use of my oscillator. You will be pleased to discover it incorporates one of your favorite concepts, the 3rd derivative of motion, or jerk. That was always one of your best ideas!
I am not using a pendulum as an oscillator. That was just the simplest oscillator to use in developing an escapement in WM2D.
The Raymond oscillator you linked to seems to beg for an escapement to close the loop.
I haven't kept up too well with Milkovic but I can't understand why he never
incorporated one. Or maybe he did.
I was forced to develop my own version to allow use of my oscillator. You will be pleased to discover it incorporates one of your favorite concepts, the 3rd derivative of motion, or jerk. That was always one of your best ideas!
I am not using a pendulum as an oscillator. That was just the simplest oscillator to use in developing an escapement in WM2D.
re: Protoclocks, escapements and closing the loop in PM
I think it's slowly begining to dawn on me what you're on about, cloud.
In my terms, you are changing the phase relationship between the two oscillators, the balance wheel (analogous to voltage) and the pendulum (analogous to current) from being slightly ahead to being slightly behind and in so doing changing the direction of flow of energy from
Ersatz Gravity -> Newtonian Gravity in a normal clock.
to
Newtonian Gravity -> Ersatz Gravity in your inverted clock.
In other words you are turning the clock from a motion driven generator of NG current below the threshold of perception to a NG driven motor of mechanical motion at the human scale.
Very ingenious I must say.
In my terms, you are changing the phase relationship between the two oscillators, the balance wheel (analogous to voltage) and the pendulum (analogous to current) from being slightly ahead to being slightly behind and in so doing changing the direction of flow of energy from
Ersatz Gravity -> Newtonian Gravity in a normal clock.
to
Newtonian Gravity -> Ersatz Gravity in your inverted clock.
In other words you are turning the clock from a motion driven generator of NG current below the threshold of perception to a NG driven motor of mechanical motion at the human scale.
Very ingenious I must say.
Who is she that cometh forth as the morning rising, fair as the moon, bright as the sun, terribilis ut castrorum acies ordinata?
Re: re: Protoclocks, escapements and closing the loop in PM
I have now seen this post.cloud camper wrote:Thanks for the research Frank - that's helpful!
The Raymond oscillator you linked to seems to beg for an escapement to close the loop.
I haven't kept up too well with Milkovic but I can't understand why he never
incorporated one. Or maybe he did.
I was forced to develop my own version to allow use of my oscillator. You will be pleased to discover it incorporates one of your favorite concepts, the 3rd derivative of motion, or jerk. That was always one of your best ideas!
I am not using a pendulum as an oscillator. That was just the simplest oscillator to use in developing an escapement in WM2D.
Interested to see that you are not using a pendulum as an oscillator. It sounds as though you have made an advance on Bessler then.
Who is she that cometh forth as the morning rising, fair as the moon, bright as the sun, terribilis ut castrorum acies ordinata?
-
cloud camper
- Devotee
- Posts: 1083
- Joined: Tue Mar 15, 2011 12:20 am
re: Protoclocks, escapements and closing the loop in PM
Aw shucks, thanks Frank but I fear you may have me confused with another forum poster that seems to claim the ability to download working Bessler blueprints directly with no pesky physics issues to deal with or klunky spendy PoP builds to interfere with one's lifestyle.
I am just a lowly experimenter sadly never blessed with supernatural mind melding abilities and have to do everything the slow painful way, one hard knock at a time.
But I have a concept of using an asymmetric oscillator in which the energy characteristics of one extreme of oscillation are entirely different than the other extreme. This could allow taking advantage of each sides positive aspects while avoiding each sides negative resulting in an energy gain.
A simple pendulum is a symmetric oscillator with the energy characteristics being identical no matter the direction of oscillation, therefore no gain possible as there is nothing to leverage.
The sims look promising but only show one cycle. An escapement is needed to produce a repeating cycle, in theory anyway. But I'm happy
how it's coming together.
My machinist yesterday was starting to see how the components fit together and he said it's starting to look like a big 'effin clock!
A working wheel is only days, weeks, months or years away!
I am just a lowly experimenter sadly never blessed with supernatural mind melding abilities and have to do everything the slow painful way, one hard knock at a time.
But I have a concept of using an asymmetric oscillator in which the energy characteristics of one extreme of oscillation are entirely different than the other extreme. This could allow taking advantage of each sides positive aspects while avoiding each sides negative resulting in an energy gain.
A simple pendulum is a symmetric oscillator with the energy characteristics being identical no matter the direction of oscillation, therefore no gain possible as there is nothing to leverage.
The sims look promising but only show one cycle. An escapement is needed to produce a repeating cycle, in theory anyway. But I'm happy
how it's coming together.
My machinist yesterday was starting to see how the components fit together and he said it's starting to look like a big 'effin clock!
A working wheel is only days, weeks, months or years away!
re: Protoclocks, escapements and closing the loop in PM
Cloud,
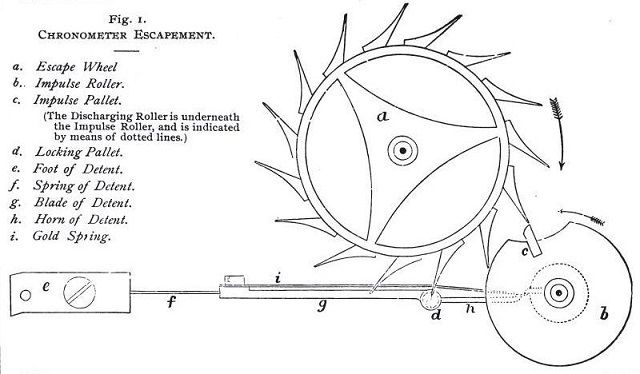
Thanks to your introducing the forum to the chronometer detent escapement which has such a different appearance from the traditional anchor class of escapement I realise that in the Gravity Pulse Motor (GPM) - Mark 5 I have incorporated equivalent elements to those of the chronometer escapement .
With reference to the terminology of the above diagram:
The gold spring is represented by the traps (or one way clutch) which prevent the compound pendulum from falling back counter-clockwise,
The rest of of the detent represent the catch which reunites the simple pendulum with the compound pendulum on its final recoil together with a release mechanism which is triggers that catch to release the simple pendulum at the start of the second cycle.
Because these items aren't collected together it's not obvious that in combination they form an escapement mechanism having the same functionality as the chronometer detent escapement.
- Attachments
-
Who is she that cometh forth as the morning rising, fair as the moon, bright as the sun, terribilis ut castrorum acies ordinata?
re: Protoclocks, escapements and closing the loop in PM
Please excuse my interruption here, all this talk on escapements and there difficulty for a table top builder brings to mind a much simpler way to achieve the same results. It is called the Geneva Gear. It can be easily assembled for either internal or external application.
See: < http://en.wikipedia.org/wiki/Geneva_drive > for the basic concepts.
Ralph
See: < http://en.wikipedia.org/wiki/Geneva_drive > for the basic concepts.
Ralph
-
cloud camper
- Devotee
- Posts: 1083
- Joined: Tue Mar 15, 2011 12:20 am
re: Protoclocks, escapements and closing the loop in PM
Hey Frank - thanks for your interest.
Yeah, it's really a clever mechanism. It's mind blowing (for me anyway) that anyone came up with it.
Some features are not necessary for a PM machine so thankfully can be ditched, such as the prevent mechanisms to stop the pendulum from going
backwards.
But there are a couple of new considerations that are necessary that would never apply to clocks.
The biggest is that the clock spring driving the escapement has to be wound up at the input end at the exact same rate angular displacement wise as it is being unwound by the escapement wheel.
If this does not happen, the spring could either unwind totally if energy was being taken out too fast, or would keep being wound tighter and tighter if energy was being taken out too slowly and would break the spring at some point.
I doubt anyone is interested in technical issues of escapements but I will go ahead and bore everyone to tears anyway. If the wind up end of the spring undergoes a 90 degree arc due to an incoming pulse from the jerk mechanism, the output must then execute a 90 degree arc 1 for 1.
So since we have 12 teeth on the escapement wheel, each output pulse is only 30 degrees of arc. So we then need three output pulses for each input pulse so the spring stays happy.
What this means is that we will require a triple pulse output on the impulse roller in your diagram above or what I call the driven wheel.
A standard chronometer 15 tooth escapement wheel would require four pulses to achieve 90 degrees.
Well it appears I have made the first major blunder (besides starting this project in the first place).
I chose a 30" escapement as a WAG but the 2" dia garage door springs available are designed for a lot of turns so the torque available is just not enough to turn that big of a wheel. A good amount of torque is necessary to accelerate the escapement wheel to then drive the impulse roller or otherwise it will never catch up to the impulse pallet in time to actually drive it.
There is a 3 1/2" dia available so I ordered one to see what kind of torque it has. So it looks like we'll have to cut down the 30 incher to possibly 20" and use the 3 1/2 spring. This will reduce the inertia of the escapement wheel so it can accelerate quicker. As a last resort we can use a 2" spring inside a 3 1/2 for even more torque.
The ratchet arm used for winding the spring can also be used to manually wind the spring for a bit of preload on startup. Two one-way bearings are used, one for the windup ratchet and one for the axle to stop the spring from unwinding. At the other end of the spring the detent arm (locking pallet in your drawing) of the escapement stops the escape wheel from unwinding prematurely. So basically three one-way mechanisms!
The photo shows the 2" spring on the 30" wheel and it just looks puny.
Anyway, it's just a big 'effin clock!

Yeah, it's really a clever mechanism. It's mind blowing (for me anyway) that anyone came up with it.
Some features are not necessary for a PM machine so thankfully can be ditched, such as the prevent mechanisms to stop the pendulum from going
backwards.
But there are a couple of new considerations that are necessary that would never apply to clocks.
The biggest is that the clock spring driving the escapement has to be wound up at the input end at the exact same rate angular displacement wise as it is being unwound by the escapement wheel.
If this does not happen, the spring could either unwind totally if energy was being taken out too fast, or would keep being wound tighter and tighter if energy was being taken out too slowly and would break the spring at some point.
I doubt anyone is interested in technical issues of escapements but I will go ahead and bore everyone to tears anyway. If the wind up end of the spring undergoes a 90 degree arc due to an incoming pulse from the jerk mechanism, the output must then execute a 90 degree arc 1 for 1.
So since we have 12 teeth on the escapement wheel, each output pulse is only 30 degrees of arc. So we then need three output pulses for each input pulse so the spring stays happy.
What this means is that we will require a triple pulse output on the impulse roller in your diagram above or what I call the driven wheel.
A standard chronometer 15 tooth escapement wheel would require four pulses to achieve 90 degrees.
Well it appears I have made the first major blunder (besides starting this project in the first place).
I chose a 30" escapement as a WAG but the 2" dia garage door springs available are designed for a lot of turns so the torque available is just not enough to turn that big of a wheel. A good amount of torque is necessary to accelerate the escapement wheel to then drive the impulse roller or otherwise it will never catch up to the impulse pallet in time to actually drive it.
There is a 3 1/2" dia available so I ordered one to see what kind of torque it has. So it looks like we'll have to cut down the 30 incher to possibly 20" and use the 3 1/2 spring. This will reduce the inertia of the escapement wheel so it can accelerate quicker. As a last resort we can use a 2" spring inside a 3 1/2 for even more torque.
The ratchet arm used for winding the spring can also be used to manually wind the spring for a bit of preload on startup. Two one-way bearings are used, one for the windup ratchet and one for the axle to stop the spring from unwinding. At the other end of the spring the detent arm (locking pallet in your drawing) of the escapement stops the escape wheel from unwinding prematurely. So basically three one-way mechanisms!
The photo shows the 2" spring on the 30" wheel and it just looks puny.
Anyway, it's just a big 'effin clock!

re: Protoclocks, escapements and closing the loop in PM
Experimental woes of the kind you're suffering are the reason I stick to theory as far as possible - and whilst on that subject you'll be pleased to know that I've discovered a beautiful thermodynamic proof that harnessing Newtonian Gravity in the way we are attempting must be possible.
I am laboriously inputting this post on an IPad keyboard so I won't attempt any further explanation till my grandson lets me have my computer back. :-)
I am laboriously inputting this post on an IPad keyboard so I won't attempt any further explanation till my grandson lets me have my computer back. :-)
Who is she that cometh forth as the morning rising, fair as the moon, bright as the sun, terribilis ut castrorum acies ordinata?
-
cloud camper
- Devotee
- Posts: 1083
- Joined: Tue Mar 15, 2011 12:20 am
re: Protoclocks, escapements and closing the loop in PM
Sure Frank, love to hear about it.
There are definitely ways to harness gravity. I think the original Milkovic oscillator is doing it. It certainly wouldn't work without it.
I believe the Rotary Milkovic that I posted is doing it. Not directly but indirectly by shifting CoM horizontally with no work for distance issues as every vertical/horizontal input is counterbalanced.
Not one person has attempted to debunk it in four years although I won't swear it can't be done. I'll just have to build one and see if it does as well as the sim.
If we're lifting a 500 lb pendulum from dead stop 5 feet vertically every 10 sec with zero brute lifting energy input, that seems like a result to me. Gravity is doing a huge amount of work but must be tricked into doing it with a secondary mechanism of some sort.
So we upset the lateral CoM for (almost) free which then causes the 500 lb pendulum to do insane amounts of work to restore equilibrium.
My current project uses gravity for part of it's operation but also uses a secondary jerk mechanism to create spikes of energy that then exceed the initial PE values (in simulation).
So gravity is the catalyst for a potential energy gain but can't do it alone and must be combined with a secondary reaction.
Wowzers, I only told my machinist 24 hrs ago we need to decrease diameter of the escapement wheel to 20 inches and he has it done!
Waiting on some bearings so that will hold things up but hopefully will finish the main plate supporting the esc wheel, driven wheel and detent bar this week. Will post photos.
Cheers!
There are definitely ways to harness gravity. I think the original Milkovic oscillator is doing it. It certainly wouldn't work without it.
I believe the Rotary Milkovic that I posted is doing it. Not directly but indirectly by shifting CoM horizontally with no work for distance issues as every vertical/horizontal input is counterbalanced.
Not one person has attempted to debunk it in four years although I won't swear it can't be done. I'll just have to build one and see if it does as well as the sim.
If we're lifting a 500 lb pendulum from dead stop 5 feet vertically every 10 sec with zero brute lifting energy input, that seems like a result to me. Gravity is doing a huge amount of work but must be tricked into doing it with a secondary mechanism of some sort.
So we upset the lateral CoM for (almost) free which then causes the 500 lb pendulum to do insane amounts of work to restore equilibrium.
My current project uses gravity for part of it's operation but also uses a secondary jerk mechanism to create spikes of energy that then exceed the initial PE values (in simulation).
So gravity is the catalyst for a potential energy gain but can't do it alone and must be combined with a secondary reaction.
Wowzers, I only told my machinist 24 hrs ago we need to decrease diameter of the escapement wheel to 20 inches and he has it done!
Waiting on some bearings so that will hold things up but hopefully will finish the main plate supporting the esc wheel, driven wheel and detent bar this week. Will post photos.
Cheers!
-
cloud camper
- Devotee
- Posts: 1083
- Joined: Tue Mar 15, 2011 12:20 am
re: Protoclocks, escapements and closing the loop in PM
Woohoo - made a little progress today.
20 inch escape wheel, 11 1/2" impulse roller on mounting plate.
Next is to mount the wheels to the plate, mount plate to test stand,
drill and mount impulse pallets, discharge pins and fab detent bar.
Chain sprocket will drive oscillator.
First I couldn't even spell whoreologist and now I are one.

20 inch escape wheel, 11 1/2" impulse roller on mounting plate.
Next is to mount the wheels to the plate, mount plate to test stand,
drill and mount impulse pallets, discharge pins and fab detent bar.
Chain sprocket will drive oscillator.
First I couldn't even spell whoreologist and now I are one.

re: Protoclocks, escapements and closing the loop in PM
Do you mean a HOROLOGIST turned whoreologist or do I have it backwards?
re: Protoclocks, escapements and closing the loop in PM
I'm impressed. :-)
I can see the point of a long coiled spring rather than a traditional flat spring. You can easily get at both ends.
Apropos springs, from a theory point of view I find it easier to think in terms of a flywheel. One brings it up to speed initially, equivalent to winding up a spring, and then one takes out or puts in increments of change in angular acceleration (jerk energy). Of course, this is what a spring is doing but the dynamics are hidden away at the atomic scale whereas in the case of a flywheel the dynamics are manifest.
This ties in with the concept of the wheel as in Bessler's.
Still, time enough for the implications of your device when you have achieved inverted clock action.
My thermodynamic proof is coming on well. I have prepared two Stirling cycle diagrams which you will find at the link below.
http://www.besslerwheel.com/forum/viewt ... 164#132164
I can see the point of a long coiled spring rather than a traditional flat spring. You can easily get at both ends.
Apropos springs, from a theory point of view I find it easier to think in terms of a flywheel. One brings it up to speed initially, equivalent to winding up a spring, and then one takes out or puts in increments of change in angular acceleration (jerk energy). Of course, this is what a spring is doing but the dynamics are hidden away at the atomic scale whereas in the case of a flywheel the dynamics are manifest.
This ties in with the concept of the wheel as in Bessler's.
Still, time enough for the implications of your device when you have achieved inverted clock action.
My thermodynamic proof is coming on well. I have prepared two Stirling cycle diagrams which you will find at the link below.
http://www.besslerwheel.com/forum/viewt ... 164#132164
Who is she that cometh forth as the morning rising, fair as the moon, bright as the sun, terribilis ut castrorum acies ordinata?
-
cloud camper
- Devotee
- Posts: 1083
- Joined: Tue Mar 15, 2011 12:20 am
re: Protoclocks, escapements and closing the loop in PM
Ya Frank, it makes it very easy to change springs. I think we will have to do that a lot as it will be necessary to get just enough torque in the spring to restore PE to the oscillator but too much will be just wasted in impact losses.
That is the gravity part of the oscillator only goes so high and hits a stop so we want exactly the right amount of energy to just touch the stop but not hammer it.
But we can add torque by increasing preload (turns) on the spring to dial it in. Then at the input end we just hit it with a bigger hammer (jerk) to keep it wound up.
If Bessler did it this way he must have used a flat spring. I considered using a flat spring but my machinist talked me out of it as it can be very dangerous to wind/install it without it exploding in your face or slicing off fingers! Could be done later I spoz to keep device width minimized but the garage door spring seems to be much easier to implement. Not to mention cheap (free) if you happen to know someone in the garage door business!
I will be using a standard pendulum to dial in/degug/tweak the escapement but then it will be removed and replaced with the real oscillator.
So more clock like stuff!
@Ralph - thanks for the info on the Geneva Drive. I used those on one of my last build attempts. The work beautifully with very little friction. I'll post some pics.
The problem with them in a clock like device is that they lock an output device into a fixed position for a defined arc then they move on again. The escapement preserves much more freedom of movement of the output device (oscillator), acting like a mechanical diode.
That is the gravity part of the oscillator only goes so high and hits a stop so we want exactly the right amount of energy to just touch the stop but not hammer it.
But we can add torque by increasing preload (turns) on the spring to dial it in. Then at the input end we just hit it with a bigger hammer (jerk) to keep it wound up.
If Bessler did it this way he must have used a flat spring. I considered using a flat spring but my machinist talked me out of it as it can be very dangerous to wind/install it without it exploding in your face or slicing off fingers! Could be done later I spoz to keep device width minimized but the garage door spring seems to be much easier to implement. Not to mention cheap (free) if you happen to know someone in the garage door business!
I will be using a standard pendulum to dial in/degug/tweak the escapement but then it will be removed and replaced with the real oscillator.
So more clock like stuff!
@Ralph - thanks for the info on the Geneva Drive. I used those on one of my last build attempts. The work beautifully with very little friction. I'll post some pics.
The problem with them in a clock like device is that they lock an output device into a fixed position for a defined arc then they move on again. The escapement preserves much more freedom of movement of the output device (oscillator), acting like a mechanical diode.
