Posted by Scott Ellis (216.87.95.64) on December 03, 2002 at 19:46:13:
Here is a submission by a friend of mine who goes by Mr. Tim. He was kind enough to share a diagram and description of his latest idea.
-Scott
>>>>>>>>>>>>>>>> snip >>>>>>>>>>>>>>>>>>
DON'T PANIC! The Hitchhiker's Guide to the GalaxyThe following is courtesy of MrTim. Drawings not to scale or proportion.
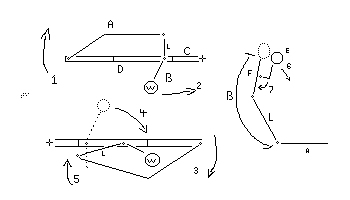
C is wheel arm. D is a slide track in C. A is a leverage arm (w/45 degree bend), one end of which is attached to outer part of C. B is a lever (w/30 degree bend) with weight W at one end (other end attached to A). A pivot is located at the bend of B, which slides freely in D.
Operation:
> As C moves upward (1), W pulls B inward along D (2).
> When C is moving downward (3), W 'flips' B over to slide B's pivot along D (4). End of A moves up (5) allowing L to reach it's full horizontal position.
> E is an 'improvement'. It allows W to flip over sooner (6). (E only has to move a short distance (and stop parallel to F) It's function is to change the c.o.g. of B earlier.) For (2), W on E must contact F to provide the leverage.> (7) can be ignored.
-Trade-offs-
> The longer L is, the greater the 'differential' (i.e. distance between weights on opposite sides), but this requires more space so that adjacent mechs don't interefere with each other.
> F can be made longer for improved (2), but this contributes to 'drag' (weights hanging below axis of wheel arm). Shorter F results in less efficient (2).